With river flows still below normal fall levels, my focus was on an outside bend of the river that was catching much of the available current. An old wing dam, now sitting exposed above the water, is present along this shore, providing a well-defined current seam for several hundred feet downstream. This seemed like a reasonable area to find a fish or two, and to test i-Pilot’s track record and cruise control functions in a trolling situation. My plan was to use the Track Record feature to establish a trolling path through this area, and to use the Cruise Control function to maintain my speed as I followed the recorded track from its start to its end.
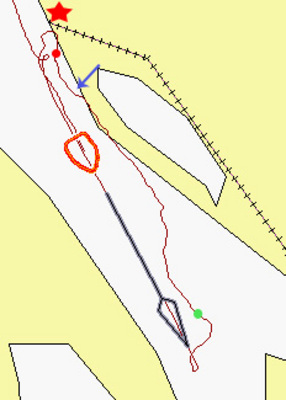
Here’s a screen capture from my Humminbird 1197 that shows the area where I was fishing, as well as the track I recorded through the fishing area. If you are familiar with Pool 4 of the Mississippi River, this area is the entrance to the Wisconsin Channel toward the upper portion of the pool, with Everts Resort located at the red star. Water depth in this area varies from 9 feet (toward the green dot, the start of the recorded track) to 20-22 feet in the area of the exposed wing dam (marked by the blue arrow). I stopped recording the track at the red dot for a total recorded track length of approximately 3000 feet, well within Track Record’s maximum track length of 2 miles (for each of the three recordable tracks). In this screen capture, I am on my way back downstream, ready to follow my recorded track.